管理人のイエイリです。
クルマの自動運転には、路面の形状や白線、標識などの最新情報を盛り込んだ道路地図が欠かせません。
しかし、これまでは3Dレーザースキャナーを搭載した車両で路面を計測する「MMS(モービルマッピングシステム)」によって道路のデータ収集を行っていたため、地図の更新頻度が少ないという問題がありました。
そこでトヨタ自動車は、道路地図をスピーディーに作る「地図自動生成システム」を開発しました。
ナ、ナ、ナ、ナント、
車載カメラとGPS
(全地球測位システム)によって、自動運転に必要なレベルの高精度地図を自動作成することができるのです。
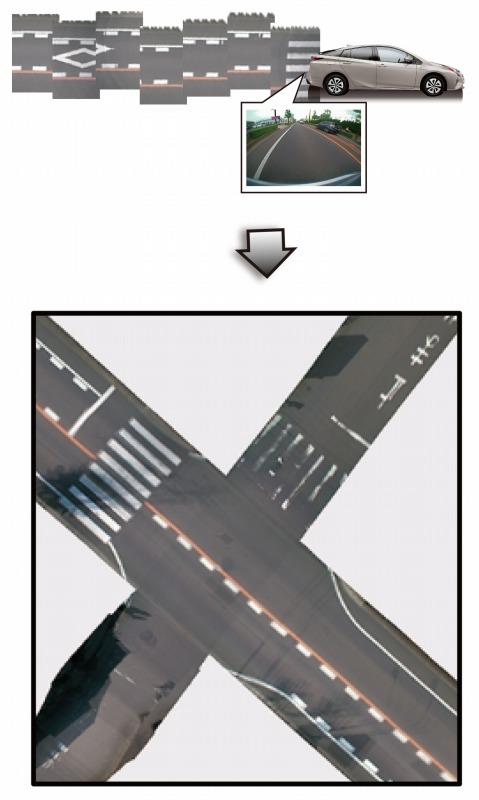
車載カメラとGPSで道路地図を自動生成するイメージ(以下の資料:トヨタ自動車)
市販のクルマに搭載されているカメラで収集した路面の画像データと位置情報をデータセンターに集約し、広域の高精度地図を作るシステムです。
もちろん、車載カメラとGPSによるデータは1つ1つは誤差が大きいですが、走行軌跡を高精度に推定する技術と、複数車両の路面画像データを統合・補正することにより、位置誤差を直線路の場合で誤差5cm以内に収めます。
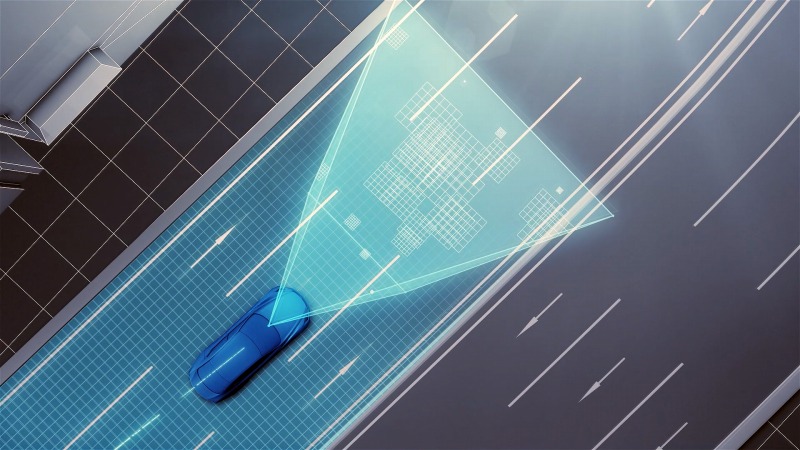
車載カメラによって路面の画像データを収集する
路面標識も撮影

案内標識も撮影

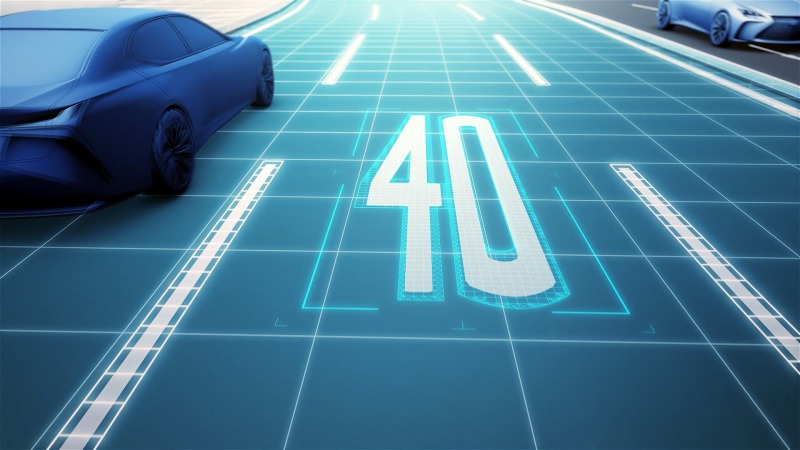
数多くの車両からのデータを統合・補正して高精度な道路地図を作成する
地図自動生成システムのイメージ映像●
このシステムは、トヨタ中央研究所が開発したクラウド型の空間情報生成技術「COSMIC」を採用しています。
情報収集に市販のクルマや既存のインフラを活用できるので、リアルタイムにかつ安価にデータ更新が可能です。
トヨタは、2020年ごろに実用化を目指している自動車専用道路での自動運転に、このシステムが必要となるとしています。
将来的には一般道の地図作成や、
道路上の障害物
のデータも収集できるように機能拡張を行う方針とのことです。
クルマの自動運転というと、道路上で思わぬ障害物があったとき、ちゃんと避けられるかどうかが心配になりますが、このようなシステムでリアルタイムに情報が更新されると安心ですね。
道路の維持管理的には、路面や施設の異常発見や積雪状況などの早期把握などにも使えそうです。一般ドライバーも、道路の維持管理に参加する時代が、すぐそこまでやってきています。
(ごあいさつ)
今年も「建設ITブログ」をご愛読いただき、ありがとうございました。今年の投稿は、これが最後となります。新年は1月6日ごろから再開の予定です。皆様、よいお年をお迎えください。