管理人のイエイリです。
今後、橋梁やダムなどの社会インフラは建設から50年を経過するものが急激に増えてきます。一方、老朽化に対応する資金や高度や専門知識を持つ人材の不足も課題になってきました。
そこで新エネルギー・産業技術総合開発機構(NEDO)は、2014年度から効率的なインフラの維持管理を行うため、点検ロボットの研究開発を推進しています。
その一環として本日(10月28日)、神奈川県伊勢原市の毘沙門橋で、橋梁点検ロボットの実証実験を行うことになりました。

- 富士フイルムが開発したステレオカメラを搭載した橋梁近接目視代替ロボット(以下の写真:NEDO)
橋梁などの点検は、原則、「近接目視」で行うことが求められますが、人間が立ち入るのが困難な場所の点検を想定して、このロボットには
ナ、ナ、ナ、ナント、
橋梁点検用ステレオカメラ
が搭載されているのです。
このロボットは、富士フイルムがイクシスリサーチや首都高速道路技術センターと共同開発しているものです。
橋梁の主桁にぶら下がって移動するロボット本体に搭載した複眼式のステレオカメラによって、部材を異なる視点から写真撮影し、そのデータを画像処理することで損傷や正確なひび割れ幅などの情報を得ることができます。
今回の実証実験では、近接目視による点検の支援が可能かなど、有効性を検証します。
NEDOではこのほか、10月24日~25日に同市内の城山ダムで、キューアイが開発したダム調査ロボットシステムの実証実験も行いました。
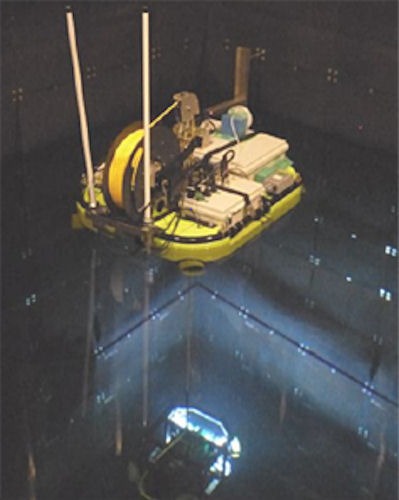
キューアイが開発したダム調査ロボットシステム
水上ロボットを母船とし、そこから吊り下げて航行できる水中ロボットを組み合わせたものです。水上、水中ロボットが連携して堤体の水中部をカメラで撮影し、その劣化状態を点検します。
水中ロボットは、ダム堤体壁面の自動調査機能を持っているほか、
壁面に吸着・停留
する機能も備えています。
今回の実証実験は、さがみロボット産業特区の取り組みの一環として行われたもので、今年5月に神奈川県が公募した「ロボット実証実験支援事業」の支援を受けました。
今後、両社は神奈川県と連携しながらダムや橋梁点検用ロボットの早期実用化を目指します。
構造物の状態をいったん、映像というデータに記録してからチェックすることで、コンピューターの力を活用したり、クラウドで遠隔地の専門家に見てもらったりすることができ、点検のIoT(Internet
of Things)化も加速しそうです。
さがみロボット産業特区の成果に、期待したいです。