管理人のイエイリです。
陸上の土木工事では、国土交通省の「i-Construction」施策の影響で、ドローン(無人機)が全国的に普及しています。
大林組はダムや護岸など、水中にあるインフラ点検のため、まさに“水中ドローン”とも言える点検ロボット「ディアグ」を開発しました。
大きさは幅780×高さ711mm×長さ1508mmで、重量は約130kg。4人で持ち運びができます。潜水士では不可能な水深100mまでの計測に対応できます。
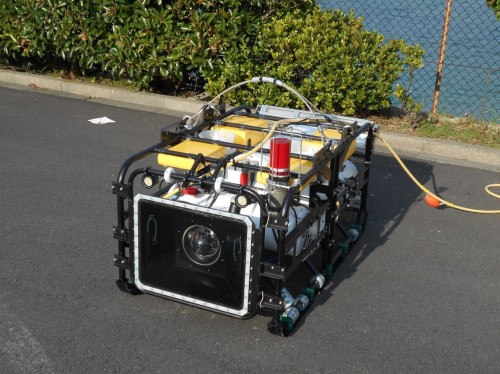
水中インフラ点検ロボット「ディアグ」(以下の写真、資料:大林組)

コントローラーのイメージ
水中インフラの点検でも、重要なのが写真撮影の機能です。ドローンは多少、風がある現場でも空中にぴたりと止まって写真撮影が行えますが、それと同様に「ディアグ」は水流があるところでも、
ナ、ナ、ナ、ナント、
ほとんど静止した状態
で、水中の対象物を撮影することができるのです。
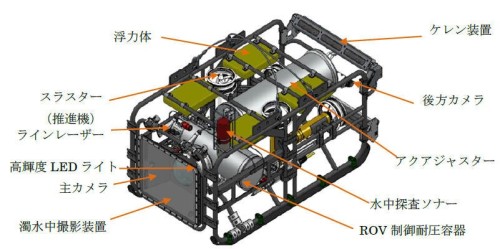
「ディアグ」に搭載された様々な機器類
その秘密は、ディアグに搭載された「アクアジャススター」というジャイロ装置にあります。物体が高速回転することで姿勢が乱されにくくするものです。
大林組は、東京スカイツリーの施工時に、タワークレーンの吊り荷が風で揺れないように同様の仕組みを持つ「スカイジャスター」という独自技術を使っていましたが、それを水中の点検ロボットにも応用しました。
また、ドローンでは現在位置の計測にGNSS(全地球測位システム)を使っていますが、残念ながら水中では使えません。
その代わりに導入したのが、「トランスポンダ」という位置計測装置です。水上に作業船を配置し、そこから潜水中のディアグに向けて音波(応答信号)を送ります。
すると、ディアグからは返答信号を送り返します。そのときの音波の往復時間と水中の音速から、作業船とディアグの距離を計測することができます。
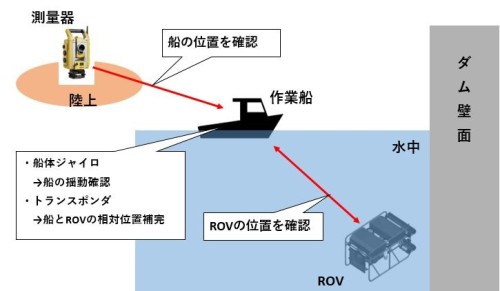
ディアグや点検個所の位置確認方法
電源は作業船に搭載した発電機から電線で電源供給を受けるので、長時間、連続して稼働することが可能です。
水中での撮影となると、水が濁って視界が悪いこともあります。そこで、ディアグでは搭載したハイビジョンカメラで撮影した画像を、
画像解析で浮遊物を除去
したうえで、モニターに表示する機能を持っています。
そのため、濁った水の中でも、リアルタイムで鮮明な映像を見ることができます。

もとの映像

画像解析後の映像。濁りがとれてくっきりした映像がリアルタイムで見られる
写真撮影のほか、本体からラインレーザーを照射してひび割れなどの寸法を計測することもできます。
このロボットは国土交通省による公募「次世代社会インフラ用ロボット技術・ロボットシステム」で採択され、最高ランクの評価を獲得しました。
大林組ではディアグをダムの壁面に向かせたまま、平行移動して壁面全体の状態を一目で確認できる「モザイクマップ」の作成ができるように改良を続けています。
ダムや護岸のほか、洋上風力発電の風車基礎の点検などにも活用し、作業の安全性を高めるほか、水中構造物の長寿命化に貢献していくとのことです。
そのうち、ドローンによる地表面の3D計測と同様に、水中のダム壁面などの3Dモデル作成もできるようになるかもしれませんね。