管理人のイエイリです。
プラント配管や埋設管などの内部を点検するロボットは、これまでもいろいろと開発されています。
しかし脚型ロボットや車輪型ロボットを、先頭に搭載されたカメラの画像を見ながら遠隔操作する場合、配管形状が複雑だと操縦が難しかったり、管内を進むことが難しかったり場合もありました。
そこで京都大学、早稲田大学、岡山大学、金沢大学の研究者は、分岐部や曲がり部、バルブなどがあっても管内を走破し、内部の状況を正確に把握できるタフなロボットをこのほど開発しました。
複雑な管内を走破するために採用したのは、
ナ、ナ、ナ、ナント、
ヘビ型ロボット
だったのです。

4大学が共同で開発したヘビ型ロボット(以下の資料:京都大学、早稲田大学、岡山大学、金沢大学、科学技術振興機構、内閣府)

- 縦管内を走行するヘビ型ロボット。適度な力で“突っ張り”ながら、滑り落ちずに進むことができる

このロボットには20個の関節があり、各関節に取り付けられたモーターを駆動させることで様々な移動方式が使えます。例えば、らせん形状になったロボットが旋回しながら進む「曲らせん捻転運動」による走行も可能です。
ロボットの外周部には、圧力を感知する皮膚型の触覚センサーがぐるりと取り付けてあり、適当な力で配管内に突っ張っているかや、障害物、配管の曲がり部などを把握できます。

ロボット外周部に取り付けられた皮膚型の触覚センサー
また、しっぽの部分にはマイクロホンと姿勢を計測できる慣性センサーが装着されています。管の入り口にスピーカーを設置して音を出すと、ロボットに音が到達するまでの時間を測定。その時間から入り口からの距離を推定します。
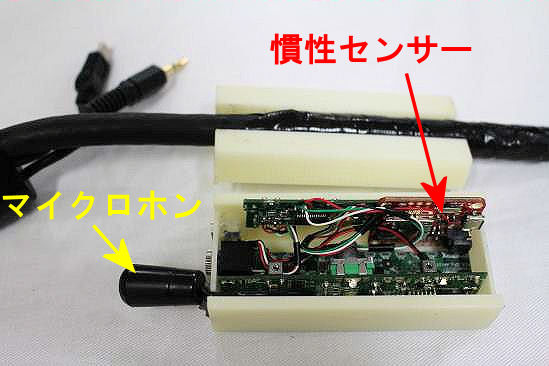
しっぽの部分に取り付けられたマイクロホンと慣性センサー
ロボットの先頭部にはもちろんカメラと照明装置が付いており、管内の状況を見ながら遠隔操作したり、映像で記録したりすることができます。

先頭に搭載されたカメラからの映像
そして、驚くべきは音響センサー、慣性センサー、各関節の姿勢情報などを組み合わせて、精度よくロボットの位置を推定できるほか、
配管の3Dモデルを自動作成
できることです。
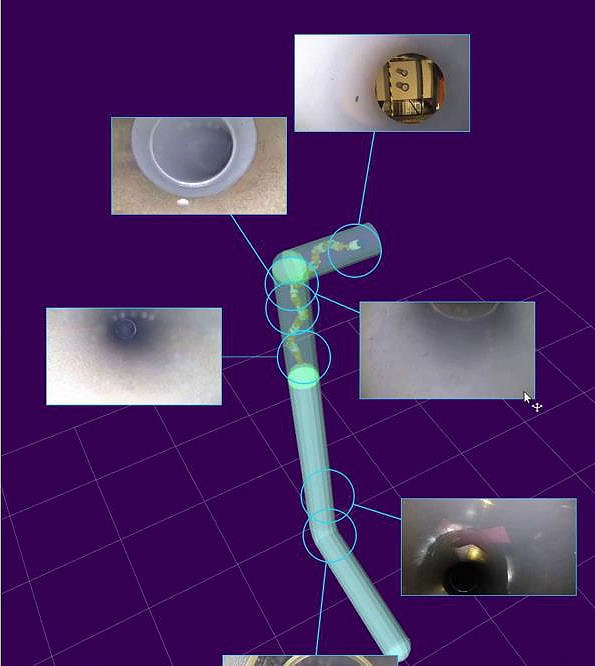
自動作成された配管の3Dモデルと各部分で撮影された管内写真
この技術は統合型SLAM(Simultaneous Localization and Mapping)というもので、自己位置の決定と配管地図の同時生成を行うものです。
気になる精度ですが、水平管・垂直管・曲管を含む長さ6m の200A の配管で実験したところ、距離推定の誤差は7%以内、配管3D地図の精度は体積率で68%以上を達成したとのことです。
なお、このロボットは、内閣府総合科学技術・イノベーション会議が主導する「革新的研究開発推進プログラム(ImPACT)タフ・ロボティクス・チャレンジにおける研究開発課題」の一つである「タフな索状ロボットおよび極限 ヒューマンインタフェースのための極限制御システムの開発」というプロジェクトで開発されました。
今後は防水防じん機能の実装や半自律制御技術の開発、故障時のリカバリー機能の開発などを計画しているとのことです。
こうしたロボットが開発されると、既存設備の3Dモデル作成を行うときも、外側から3Dレーザースキャナーでは計測できない部分などに強力な助っ人になりそうですね。