管理人のイエイリです。
土木工事で土砂の運搬に使われる不整地運搬車(クローラキャリア。以下、運搬車)の運転は、ほとんど同じ経路を往復する単調な繰り返し作業です。
しかし、運転手に疲労の蓄積や、集中力の低下が発生すると、経路からの逸脱や車両同士の接触といった事故の危険もあります。

土砂の運搬に使われる不整地運搬車(以下の写真、資料:熊谷組)
しかし、2018年9月に熊谷組が熊本県内で行った「阿蘇大橋地区斜面対策工事」では、崩壊斜面内でバックホー1台と運搬車2台による土砂の積み込み・運搬・搬出作業を、
ナ、ナ、ナ、ナント、
1人のオペが遠隔操作
で行うことに成功したのです。

バックホー1台と運搬車2台によって土砂を積み込み、運搬する作業

操作室から作業を行うオペレーター。不整地運搬車は自動的に走行するので、バックホーによる整地や積み込み作業に専念できる
1人のオペレーターが3台の重機を使って作業できたのは、熊谷組とSOINN(本社:東京都町田市)が共同開発した「AI制御による不整地運搬車の自動走行技術」のおかげです。
この技術によって複数台の運搬車が同じ経路を往復するときに、走行や停止を自動制御できるため、オペレーターは複雑な操作が必要なバックホーの運転に専念することができます。
そのため、従来はバックホーと運搬車の運転に2人のオペレーターが必要でしたが、このシステムによって1人のオペレーターで3台の運転を行えるようになりました。
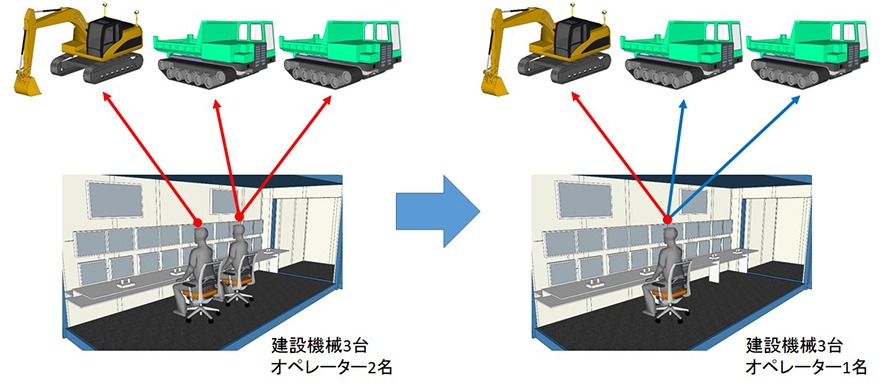
従来は2人のオペレーターが必要だった(左)が、今回の技術によって1人で3台の重機を運転できるようになった
運搬車がバックホーの脇で土砂を積み込み、方向転換を行いながら所定のルートを通って荷下ろし場まで移動する経路を教え込むのはオペレーターの役目です。
AI(人工知能)による運転の手順はまず、オペレーター自身がカメラ画像を見ながら、運搬車を手動で遠隔運転する「教示運転」を行います。これによって運搬車が自動走行する際の「教示経路データ」を作成します(教示ステップ)。

次に、このデータや車両サイズなどの条件にもとづき、AIが複数車両のすべての位置関係を算出し、衝突の危険などを分析します(分析ステップ)。
そして経路の始点・終点の位置や土砂の積み込み、荷下ろしなどの作業を考慮して、コストや時間が最小となる効率的な運行計画パターンを作成します(計画ステップ)。
後は、オペレーターが操作盤のスタートスイッチを押すだけで、複数台の運搬車は常時、AIによって進行や停止の判断が行われ、衝突することなく効率的に進行や停止を繰り返し作業を続けます(実行・指令ステップ)。
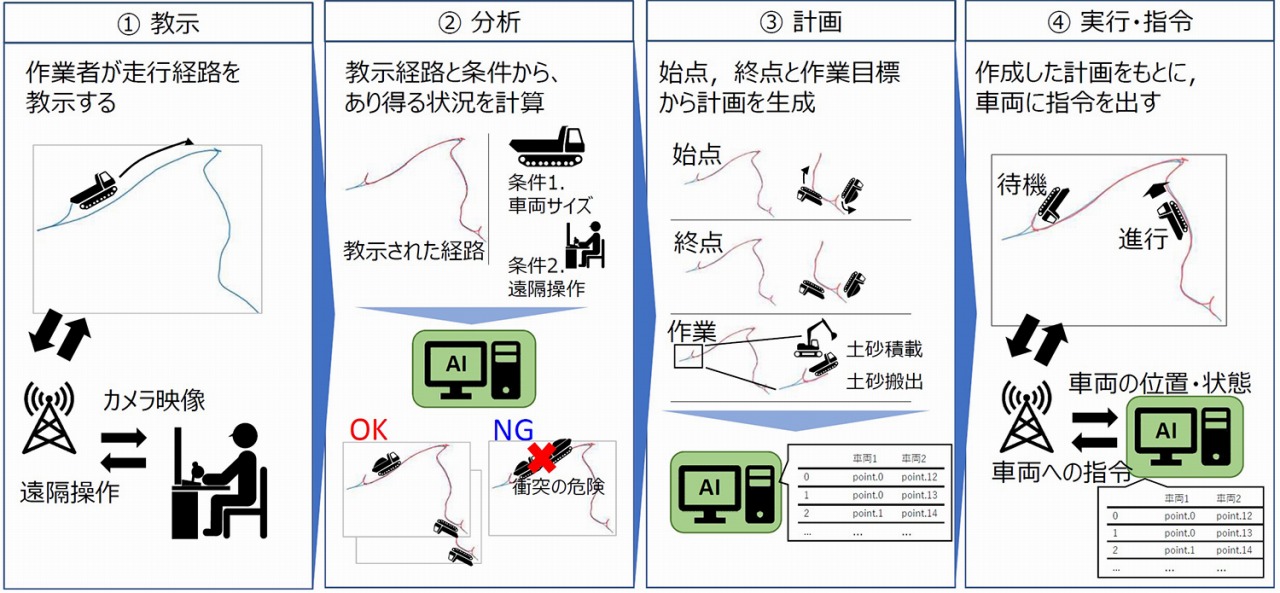
AIによる運搬車の自動運転フロー
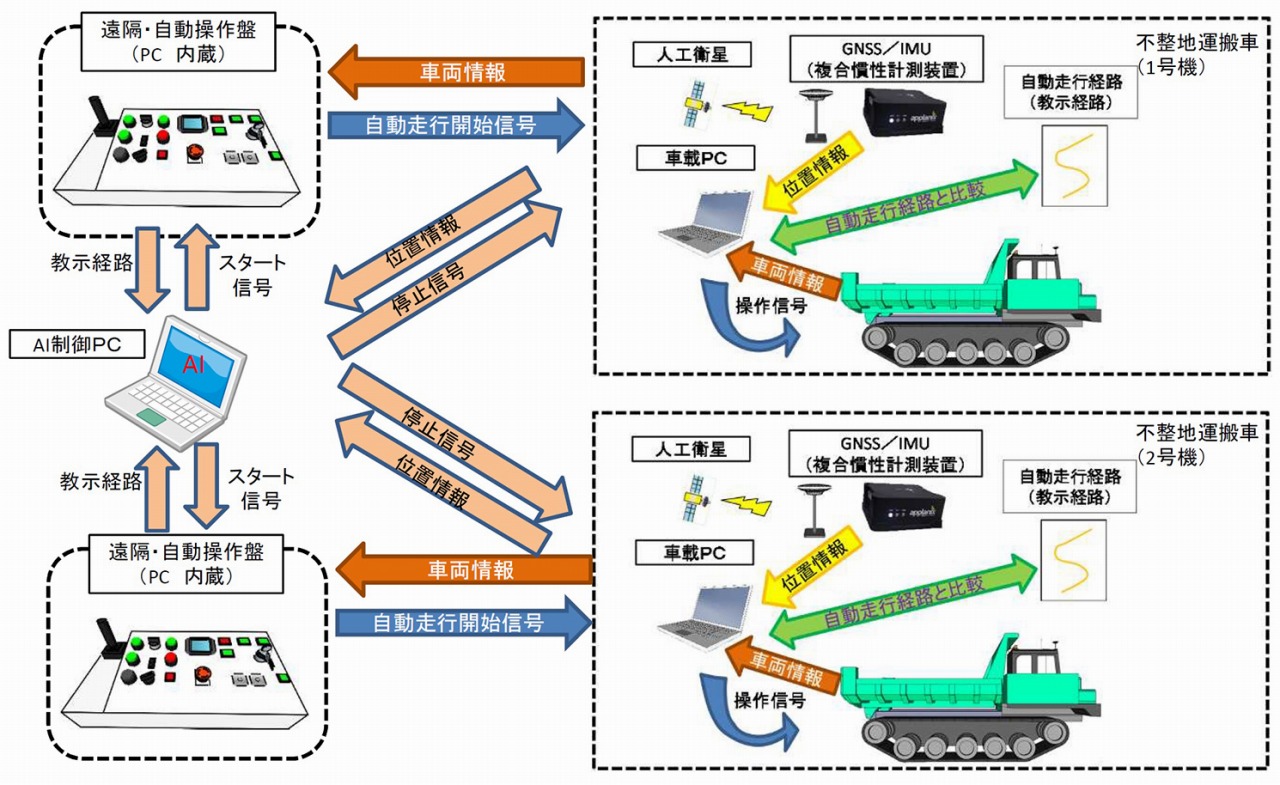
運搬車をAI制御する仕組み
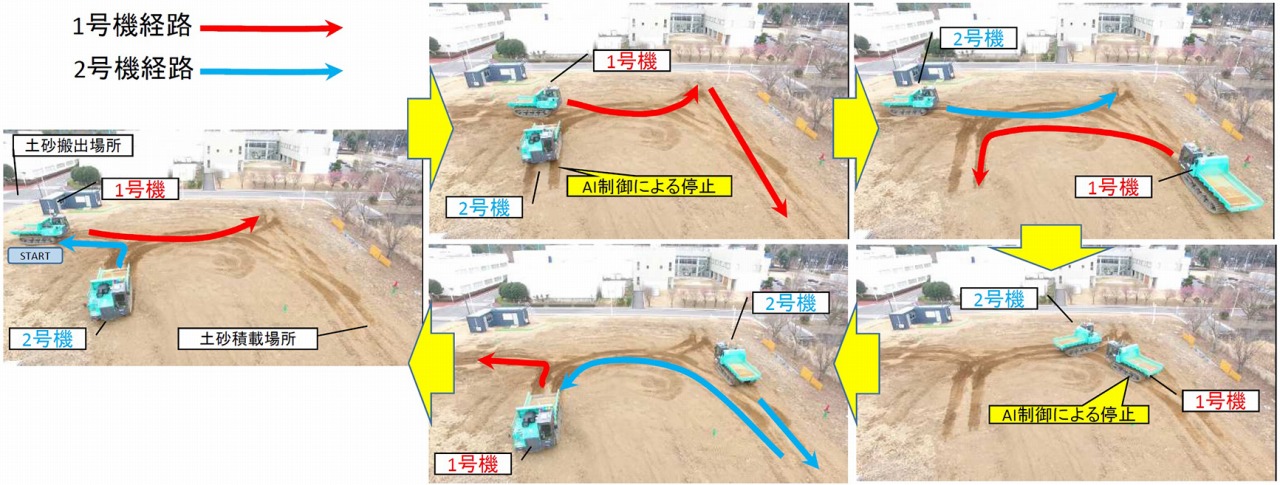
AI制御で実際に運行した状況
AIですべての運搬車の動きを監視しながら運行制御することで、安全確認の運行監視要員もいらなくなり、専用のセンサーがなくても運搬車同士の接触を防げると行った省人化・安全性向上の効果のほか、
運搬車の速度が平準化
し、燃費効率が向上するといったメリットもありました。
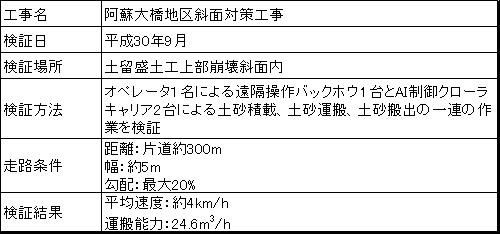
阿蘇大橋地区斜面対策工事での実証結果
熊谷組では今後、AI制御技術の向上や運行管理の高度化などを行い、本格的な実運用に向けた準備も進めていく予定です。
重機の遠隔操作はこれまで、土砂崩壊の恐れがある現場などで使われてきましたが、今後、大容量で高速な「5G」(第5世代移動通信システム)などによって重機の自動運転が行いやすくなると、普通の現場でも遠隔操作を行うケースが出てくるかもしれませんね。
すると、重機オペは現場が山奥にあっても、空調の効いた近くのオフィスに出勤し、施工に従事するという“働き方改革”の実現も夢ではなさそうです。