管理人のイエイリです。
最近の測量界で話題になっている技術には、UAV(無人機)で撮影した現場の写真を使った写真測量や、車両に3Dレーザースキャナーを搭載して走りながら周辺の3D地形や街並みを記録するMMS(モービル・マッピング・システム)などがあります。
ニコン・トリンブルはこうしたニーズに着目し、新しい写真測量システム「Trimble V10 Imaging Rover(英文)」を開発。発売準備を進めています。

新しい写真測量システム「Trimble V10 Imaging Rover」の使用イメージ(写真:特記以外は家入龍太)
GNSS(衛星測位システム)や、周囲を撮影する12台のカメラ、傾きセンサー、現場用タブレット端末などが付いたバーを持って現場を移動し、
数カ所で写真撮影
するだけで、現場を3D写真として記録できるのです。
バーの上部には12台のカメラが付いており、1カ所当たり5秒程度で撮影が終わると同時に撮影地点の座標をGNSSで求めます。そして次の場所に移動してまた撮影、という動作を繰り返すだけで現場の作業は完了です。
その写真やデータをパソコンに読み込むと、パソコン上で3D写真として記録されます。後は現場でメジャーやターゲットを持って測量する代わりに、エアコンの効いた快適な室内で、現場と同様の測量が行えるというわけです。

タブレット端末の画面に表示された12枚の写真
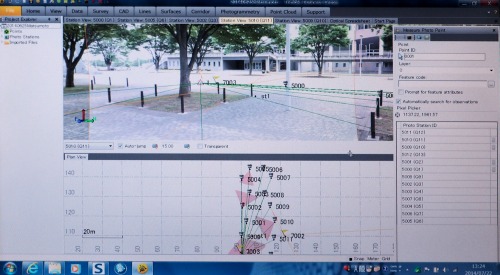
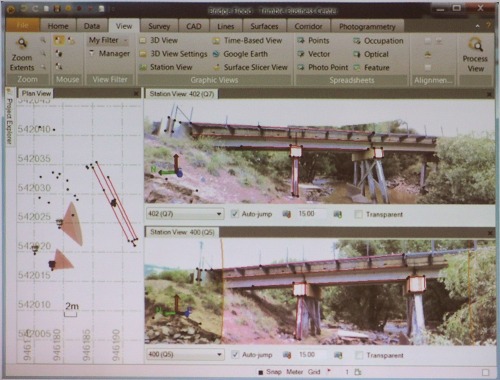
パソコンに撮影した写真を取り込み、処理すると3D写真として利用できる

12台のカメラが搭載されている。その上にはGNSSユニットが載っている
GNSSで撮影地点の座標が分かっていますので、その座標を基準点として写真に写っている任意の場所の座標を「前方交会法」で求めたり、2点間の距離などを求めたりすることができます。その精度は数mm程度とのことです。
GNSSの代わりにプリズムを取り付けると、自動追尾型のトータルステーションで写真撮影の位置を記録することも可能です。室内ではこちらの方が便利そうですね。
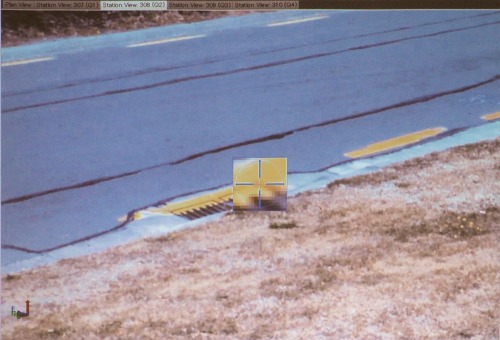 グレーチング隅の座標を求めた例。1枚目の写真上で位置を指示 |
 同じ点を2枚目の写真上で指示(左右2点の写真:ニコントリンブル) |
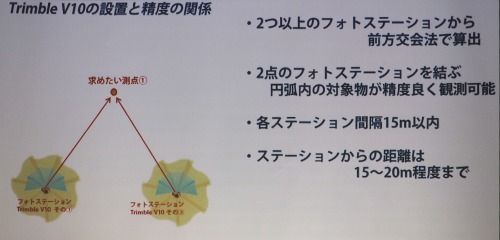 既知の2点から「前方交会法」で未知の座標点を求める原理(資料:ニコン・トリンブル) |
|
用途は現場での現況測量から、交通事故、犯行現場、災害現場の記録まで様々です。特に災害現場では現場がブルーシートで覆われてしまうことが多いので、その前に写真だけ撮っておけば、後から必要な個所の測量ができるというメリットがあります。
トリンブルと言えば、3Dデザインソフト「SketchUp」を買収したことでも知られています。その影響は、この写真測量システムにも現れています。
パソコンに取り込んだ3D写真上でトレースすることもできるのですが、そのデータを
ナ、ナ、ナ、ナント、
SketchUpに取り込み
3Dモデルとして設計などに活用できるのです。
3D写真上でのトレース(以下の資料:ニコン・トリンブル)
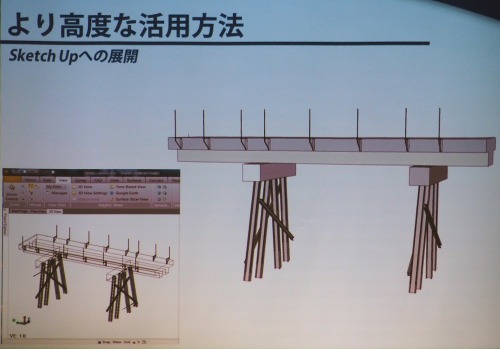
トレースしたデータをSketchUpに取り込んで3Dモデルとして設計などに活用できる
また、3D写真から点群データを生成するための開発も行われているそうです。
「Trimble V10 Imaging Rover」は今年末または来春発売予定で、気になるお値段は300万円程度になりそうとのこと。スピーディーに現場をそっくり3Dで記録できる測量機として人気が出そうですね。