管理人のイエイリです。
山岳トンネル工事では、1~2mごとに掘削最前線の「切り羽」面にドリルで穴を開け、爆薬を仕掛けて発破しながら掘削していきます。
このとき、重要なのが(1)発破後の切り羽形状を計画断面から広げすぎないことと、(2)発破後のずり(飛び石)の形状から爆薬の最適量を判断して次回の発破作業に生かすことで、「PDCA」を回しながら最適な発破を追求することです。

発破後の切り羽形状と飛び石形状のイメージ図(以下の資料、写真:戸田建設)
“経験工学”の代表工種である山岳トンネル工事では、切り羽や飛び石形状の評価は熟練工が行ってきましたが、ご多分にもれず、こうした経験を持つ人が少なくなってきました。
そこで戸田建設とRist(本社:東京都目黒区)は、熟練工の経験値をデータ化し、誰でも使える発破良否判定システム「Blast Eye/AI(プラスト・アイ)」を開発しました。
ナ、ナ、ナ、ナント、
トンネル内でドローン
を自律飛行させて、切り羽や飛び石の形状を撮影・3D化し、さらにAI(人工知能)で発破の良し悪しを自動判定することができるのです。
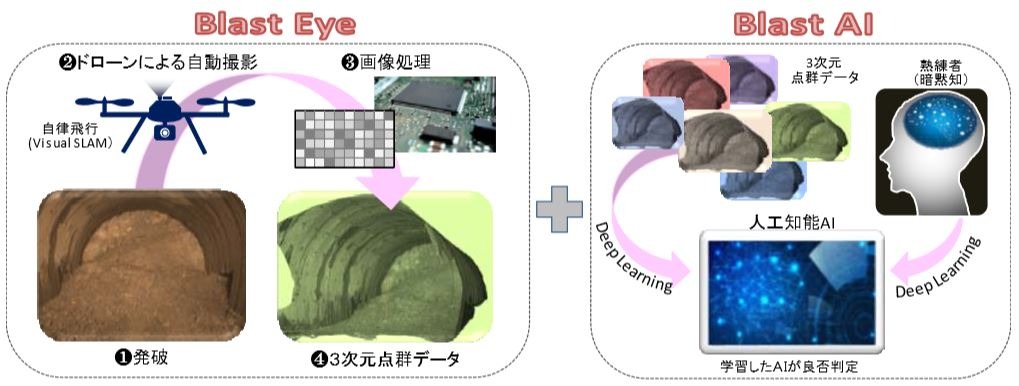
「Blast Eye/AI」システムの概念図
ICT土工など地上の工事で使われるドローン(無人機)は、GNSS(全地球測位システム)衛星の電波によって自律飛行できますが、トンネル内ではその電波が届きません。
そこで採用したのが、トンネル内の支保工やロックボルトなどの「特徴点」をステレオカメラでとらえて3D地図をリアルタイムに作成しながら、飛行位置を割り出す「Visual SLAM」という方法です。
そのためドローンの上部には位置計測用のステレオカメラと照明用の高輝度LEDライト、下部には安価なデジタルカメラが搭載されており、切り羽付近で自動的に位置をずらしながら約20枚の写真を撮影します。
ドローン本体は、あの千葉大学野波研究室の流れを引き継ぐ自律制御システム研究所(本社:千葉市美浜区)製の機体を使用しました。

位置計測用のステレオカメラと撮影用のデジタルカメラを備えたドローン

切り羽付近を自律飛行し、自動的に写真撮影するドローン
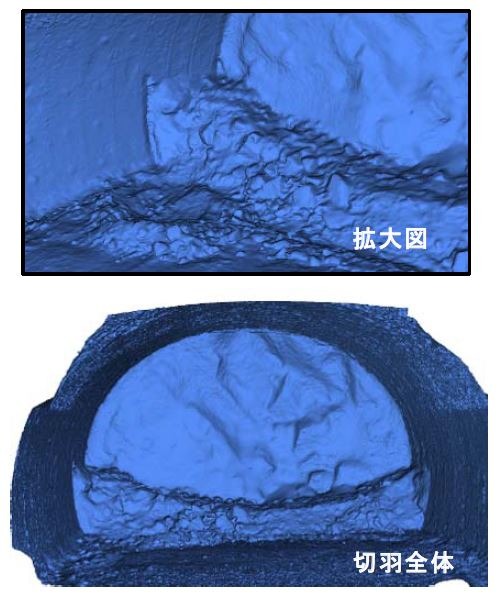
自動撮影画像から作成した切り羽や飛び石形状の3Dモデル
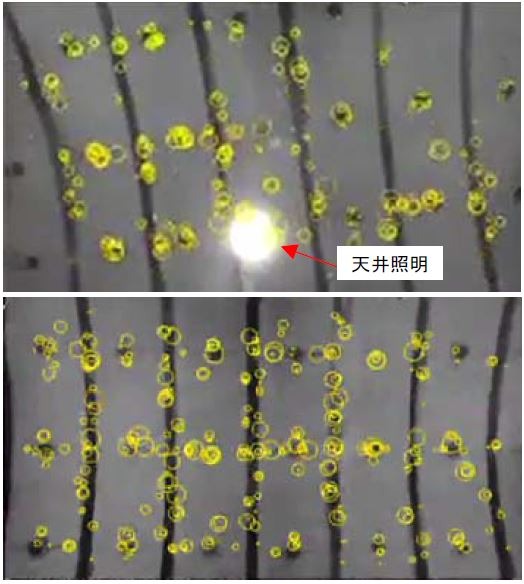
支保工やロックボルトなどを手がかりにとらえた「特徴点」
ドローンの写真から作成した3Dモデルから、爆薬量の過不足を判断する「Blast AI」システムの開発には、3D点群のディープラーニング(機械学習)に適した「PointNet」を使用しました。
AIに学習させる「教師データ」は、実験室内に模擬的なトンネル現場を造り、約150組の3Dモデルを作成しました。飛び石形状を「良好な発破」「普通の発破」「不良な発破」の3カテゴリーに分けて再現し、デジタルカメラで撮影、3Dモデル化しました。
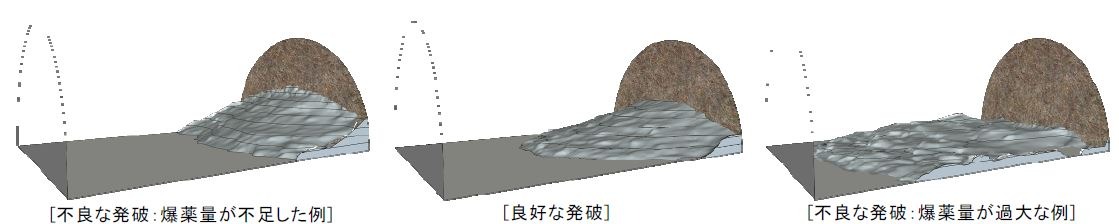
学習用データに使用した飛び石形状の3Dモデル
この「Blast Eye/AI」システムを使って検証した結果、良否判定には現場の3Dデータを入力から
約10秒で良否判定
ができ、正答率も約85%と、実用可能なレベルであることが確認されました。
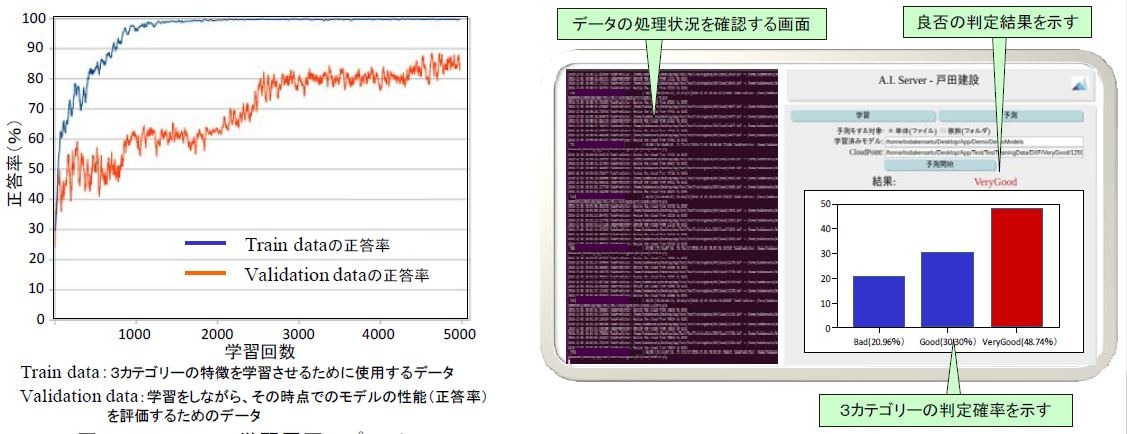
Blast AIの学習履歴(左)とAIモデルを判定するパソコン画面イメージ(右)
建設業界で使われるAIシステムは、2D画像からコンクリートや道路の路面のひび割れなどを判定するものは多く開発されていますが、3Dモデルを使ったものは珍しいです。
戸田建設ではこのシステムを現場での発破データを使ってさらに判定精度を高めるとともに、発破以外の様々な自動計測に活用を広げていく方針です。
いよいよ、「経験工学」と言われてきた暗黙知の分野も、AIで技術継承が可能になってきそうですね。