管理人のイエイリです。
3Dレーザースキャナーは、既存構造物を高精度に3Dデータ化するのに有効な機器です。
ただ、三脚に据え付けて使う地上型タイプは計測の高さに限度があり、どうしても構造物を“見上げる”ような計測となるため、橋桁内部のトラス構造など、込み入った部分の点群計測には使いづらいのが実情でした。
この問題を解決するため、インフラ用ロボットメーカーのイクシス(本社:川崎市幸区)が画期的なロボット「VAN-BO」を開発。2019年11月に発売することを予定しています。
ナ、ナ、ナ、ナント、
3Dスキャナーを持ち上げ
ることにより、高い視点から点群計測を行うものなのです。(イクシスのプレスリリースはこちら)

地上型3Dレーザースキャナーを昇降させるロボット「VAN-BO」(以下の写真、資料:特記以外はイクシス)

使用する3Dスキャナーは重さ1kgのライカ「BLK360」など(写真:家入龍太)
このロボットには、自動昇降型(3~4.5m高)と、マニュアル昇降型(8m)の2タイプが用意されています。
3Dレーザースキャナーを高い位置に持ち上げて計測できるので、橋桁の裏や工場の天井付近にある設備など、三脚に据え付けた状態では計測しにくかった部分もしっかり点群化できるようになります。
ロボットの大きさは幅300mm×長さ500mm×高さ1815mmで、重量は約33kg(3Dスキャナーは含まず)です。電源は外部から給電し、遠隔操縦が可能です。
開発に当たっての実証実験や取得データの精度検証、および今後の商品供給には、ライカジオシステムズが協力しています。

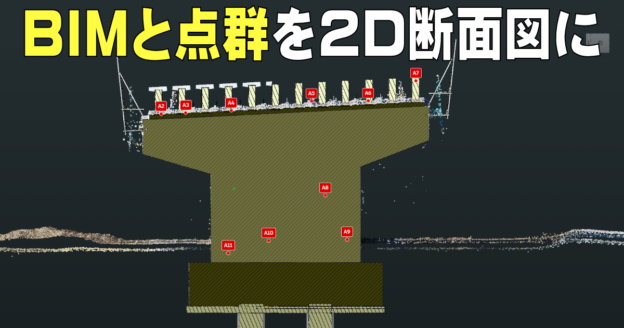
「VAN-BO」によって計測した橋桁裏のトラス構造の点群データ。これまではこうした点群化は難しかった

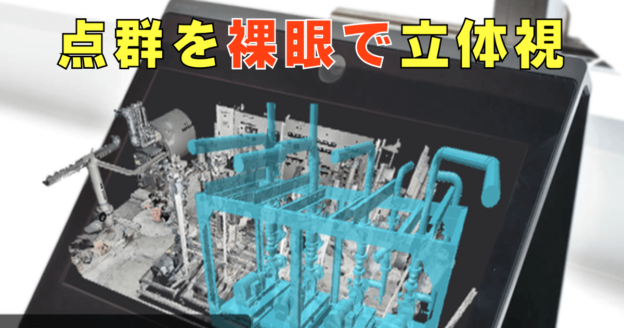
三脚に据え付けて計測した点群(左)と「VAN-BO」によって持ち上げて計測した点群(右)の比較。高い視点からだと、配管設備などのくっきりと点群化できる
搭載可能な3Dスキャナーは、BLK360のほか、
重量5kgまでの機種
なら他のメーカーの製品にも対応できます。
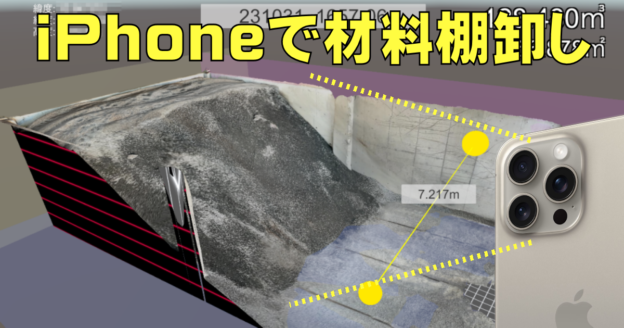
用途としては、橋梁や道路などの社会インフラや、工場・プラントの建物や設備などの計測を想定しています。
3Dレーザースキャナーによる点群計測だけでなく、いろいろな角度から撮った大量の写真をパソコンで処理して3Dモデル化する「フォトグラメトリー」でも、このロボットが活躍しそうですね。
気になるお値段は「オープン価格」です。2019年10月9日~11日まで東京ビッグサイト開催されている展示会イベント「建設テック2019」(主催:日経BP社)でも、この製品が参考出展されているそうですので、ご興味のある方はどうぞ!