管理人のイエイリです。
「オープンソース」という言葉を聞くと、パソコンで使うソフトウエアのことを思い浮かべる人も多いでしょう。
ところが、世の中にはハードウエアがらみのオープンソースもあります。例えば3Dプリンターのオープンソースを集めたサイト「RepRap.org」では、数万円で買えるキットの紹介などもあります。
先日、イタリアで開催されたバーチャルリアリティーの専門家会議「World 16 Summer Workshop」に参加して知ったのは、「ROS.org」というロボット開発に関するオープンソースのサイトです。
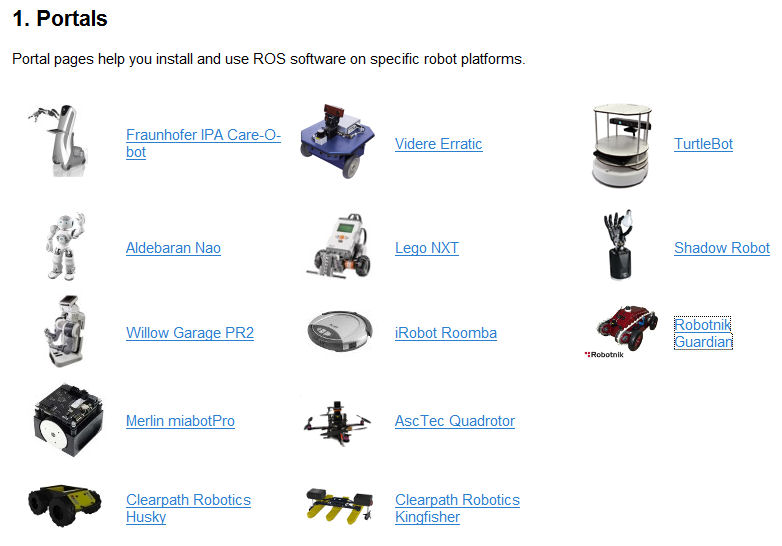
ロボットというと、地上を歩き回るものを想像してしまいがちですが、このサイトでは、
ナ、ナ、ナ、ナント、
陸・海・空
の対応するロボットがそろっているのです。地上を走行するものや水面上を進むもの、そして飛行するものまであります。
 |
|
ロボット開発に関するオープンソース資産を集めた「ROS.org」が扱うロボット(資料:ROS。以下同じ) |
これらのロボットは、それぞれ販売会社がありますが、制御用のソフトやセンサーで得た情報を処理するソフトなどは、オープンソースとしてユーザーが開発したものがまとめてあります。
例えば、室内を飛行するロボットは、Ascending Technologies社の「Pelican」、水上を航行するロボットはClearpath Robotics社の「Kingfisher M100」、そして室内を走行するロボットとしてはWillow Garage社の「TurtleBot」などがあります。
これらに、デジカメやセンサー、GPS、自律航行装置などを取り付けると、様々な目的にあったロボットが比較的、簡単に作れるというわけです。
 |
|
Ascending Technologies社の「Pelican」 |
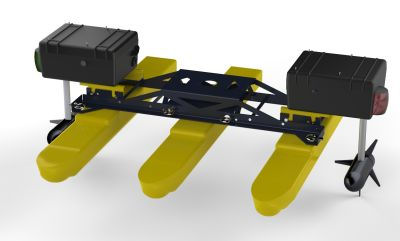 |
| Clearpath Robotics社の「Kingfisher M100」 |
 |
| Willow Garage社の「TurtleBot」 |
センサーはロボットが障害物を認識したり、室内空間を計測したりするのに重要な機能を持っています。最近、これらのロボットに使われ始めたのは、マイクロソフトのゲーム機、「Xbox 360」用の周辺機器「Kinect」なのです。
Kinectとは、昨年(2010年)に発売された周辺機器で、コントローラーを使わずジェスチャーによってゲーム機を操作するためのものです。
この機器には、赤外線によって周囲の物体を3次元でリアルタイムに計測し、
点群データが取れる
という機能が付いているのです。
 |
| Xbox用の周辺機器「Kinect」のウェブサイト |
この機能に注目したロボット開発者などが、独自でKinectの仕様などを解析し、パソコンで使うためのドライバーソフトをオープンソースで開発し、ROS.orgからダウンロードできるようになっています。
ゲーム機の周辺機器が3Dスキャナーのように使われるとは、面白い傾向ですね。