管理人のイエイリです。
少子高齢化による生産年齢人口の減少の影響が深刻になっている日本の建設業では、今後、人手不足を克服していくことが至上命令となっています。
そこで産業技術総合研究所(産総研)の知能システム研究部門ヒューマノイド研究グループは、人間の重労働作業や危険な環境での作業を行うことを目指した人間型ロボットの試作機「HRP-5P」を開発しました。
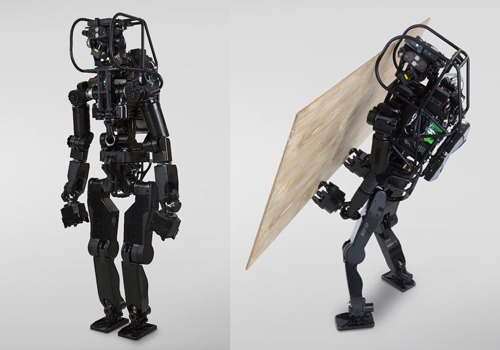
重労働作業を行えるロボットを目指した試作機「HRP-5P」(以下の写真、資料:産業技術総合研究所)
重労働を目指しただけあって、身長182cm、体重101kgと立派な体格です。そして、手先もなかなか器用で
ナ、ナ、ナ、ナント、
石膏ボードの設置・ねじ止め
という一連の作業もできるのです。(産総研のプレスリリースはこちら)
石膏ボードの山から1枚をスライドさせる

石膏ボードの山から1枚取って縦向きにする

石膏ボードを取り付け位置まで運ぶ


上の方は手を伸ばして釘打ち

下の方はしゃがんで釘打ち。安定を保つため左手は胴縁の木材を握っている
石膏ボードのサイズは1820 × 910 × 10 mmで、重さは 約11 kgです。
この作業を行うために、ロボットには様々な技術が搭載されています。
まず、人間のように細かな動きをさせるために数多くの関節があり、首部2自由度、腰部3自由度、腕部各8自由度、脚部各6自由度、ハンド部各2自由度の合計37自由度を備えています。
関節の可動範囲も大きく、股関節は人間の140度に対して202度、腰関節は人間の80度に対して300度となっています。そのため、前屈や前後開脚などは人間以上の動きができます。
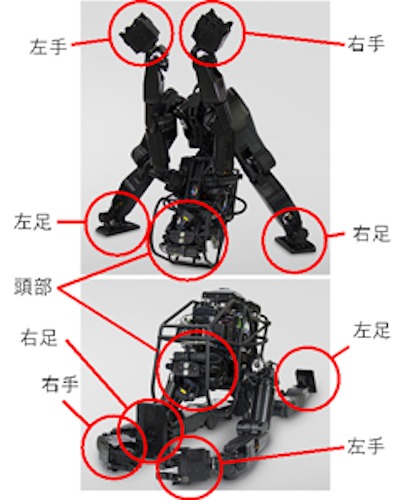
前屈(上)や前後開脚(下)の姿勢は人間を超えている
周囲の物体と衝突しないように作業するため、頭部に備えたセンサーを使って、0.3秒ごとに作業場所周辺の3D地図を作成し、搬送の歩行計画を行います。
このとき、視野の「死角」となる部分は、計測結果の蓄積や記憶の更新によって補うという賢さです。
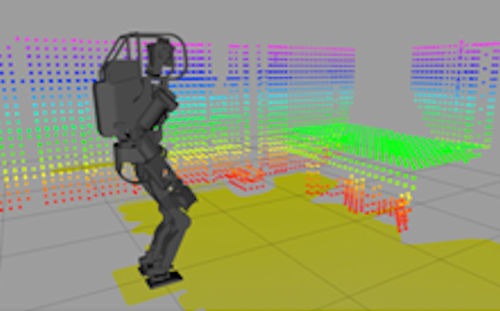
0.3秒ごとに作成する3D地図
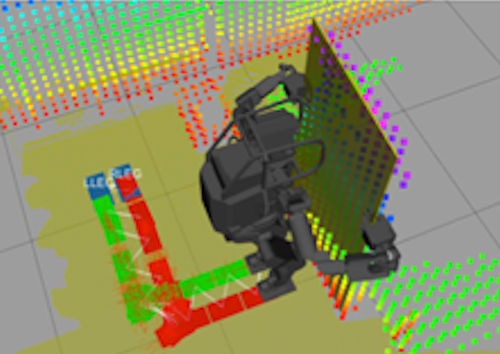
3D地図に基づいた歩行計画
工具や脚立など、作業に関係ある物体はAI(人工知能)のディープラーニング技術を使って10種類を見分けることができます。背景と重なったり、照明の条件が悪かったりしても、
90%以上の精度
で認識するという賢さです。

工具などは10種類を認識できる
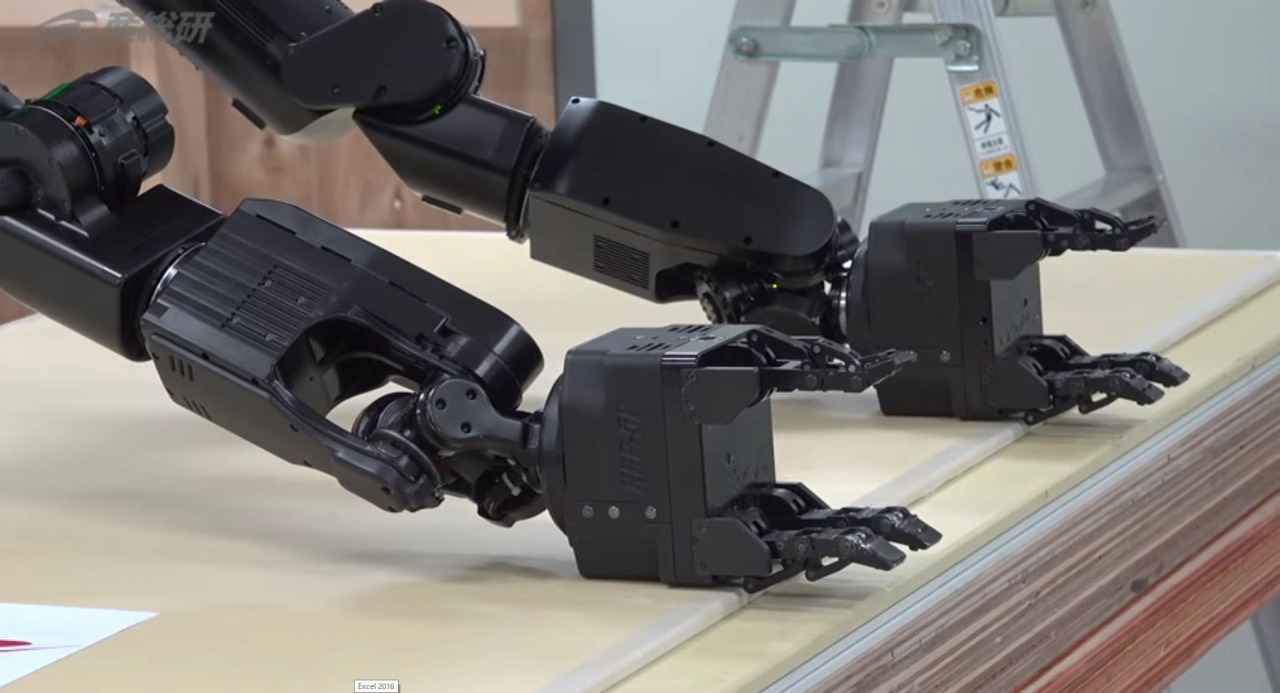
最後の釘打ち作業では、壁の横に置かれた工具箱から釘打ち機を取り出して握るという動作がありますが、ここには「高精度ARマーカー」という技術が使われています。
産総研では今後、HRP-5Pを研究開発のプラットフォームとして産学連携でロボット知能の研究開発を進め、ビルや住宅の建設現場などでの様々な作業に対応できるようにする計画です。
いよいよ、工事現場にも作業員の相棒としてロボットくんがどんどんやってくる時代になりそうですね。