管理人のイエイリです。
少子高齢化による労働力不足に対応するため、インフラの点検・維持管理分野では、構造物を一度、3Dモデルやデジタル写真などのデータにしてから、コンピューターを使って損傷箇所を見つけたり、管理したりという方法が導入されつつあります。
そこで問題となるのが、インフラの3Dモデル化です。これまではドローン(無人機)による空撮や、3Dレーザースキャナーを使って点群データ化する方法が使われてきましたが、橋梁のように狭くて複雑な部分がある構造物の内部では、高精細な画像を取得するのが困難でした。
そこで凸版印刷とイクシス(本社:川崎市幸区)は、両社の独自技術を融合させて「社会・産業インフラ向け三次元形状計測・生成・解析プラットフォーム」を共同開発することになりました。
構造物の写真を撮るのに使われる方法には、
ナ、ナ、ナ、ナント、
ロープウエー型ロボット
も使われるのです。(凸版印刷のプレスリリースはこちら)

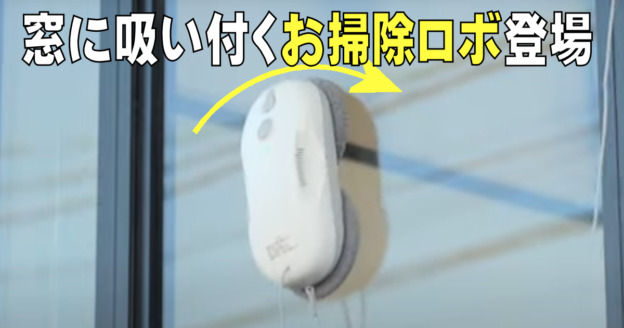
構造物の写真撮影に使われるロープウエー型ロボット「Rope Stroller」(写真:イクシス)
イクシスが開発したワイヤつり下げ型目視点検ロボット「Rope Stroller」というものです。橋脚の間にワイヤを水平に架設して、これにぶら下がって移動しながら、中央に取り付けたカメラで構造物に近づいて写真撮影できるものです。
風やワイヤの張り方で本体が傾いても、中央に搭載したジンバル(雲台)機構が働いて、カメラを一定の向きに固定します。
電源は外部から電源ケーブルで給電し、操作もLANケーブルで遠隔操縦します。

Rope Strollerの本体部(写真:イクシス)

橋桁下での使用イメージ(資料:イクシス)
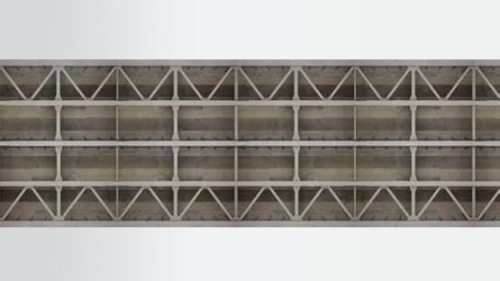
橋桁裏を撮影した写真(写真:イクシス)
橋梁の点検では、ドローンを使った方法も行われていますが、風に弱い、構造物との接触が心配、長時間の連続飛行が難しいなどの問題もあります。
その点、このロープウエー型ロボットは、ワイヤさえ張れば、長時間、じっくりと撮影ができるのでいいですね。また、ワイヤを上下方向に張れば、煙突や立て配管なども撮影できるそうです。
こうして撮った写真から3Dモデルを作るのが、凸版印刷の技術です。同社は民生品のデジタルカメラで撮影した写真だけを使って、高精度の3Dモデルを自動的に生成する技術を持っています。
写真から3Dモデルを作る「フォトグラメトリー」と言われる技術の肝となるのが、複数枚の写真に写った同一点を探し出し、対応させる後術ですが、凸版印刷の場合、
1画素以下の精度で推定
することができるのです。

地表の撮影写真(左)から自動生成した3Dモデル(右)(資料:凸版印刷)
また、イクシスはAI(人工知能)による空間の解析や、BIM(ビルディング・インフォメーション・モデリング)、CIM(コンストラクション・インフォメーション・モデリング)を使った制御技術も持っていますので、出来上がった3Dモデルを解析する作業でも、強みを発揮しそうです。
両社はこのシステムが、社会・産業インフラの現場で広く活用されるプラットフォームになることを目指して共同開発を推進し、インフラ点検企業との実証実験なども行っていきます。そして2020年度中の提供開始を目指すとのことです。
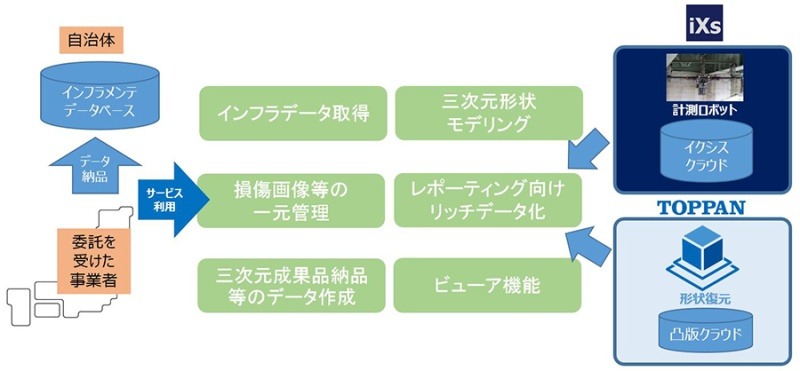
「社会・産業インフラ向け三次元形状計測・生成・解析プラットフォーム」のイメージ図(資料:凸版印刷)
このプラットフォームについては、2019年7月24日から26日まで、東京ビッグサイトで開催される「第11回インフラ検査・維持管理展」で、イクシスのブース(W1-G37)で展示される予定ですので、ご興味のある方はどうぞ!