管理人のイエイリです。
将来、月に人間が長期間滞在できる宇宙基地を建設する日がやってきそうです。
そこで宇宙航空研究開発機構(JAXA)と鹿島は、芝浦工業大学、電気通信大学、京都大学とともに、2016年から月や火星など宇宙での建設工事を行うための共同研究開発を進めてきました。
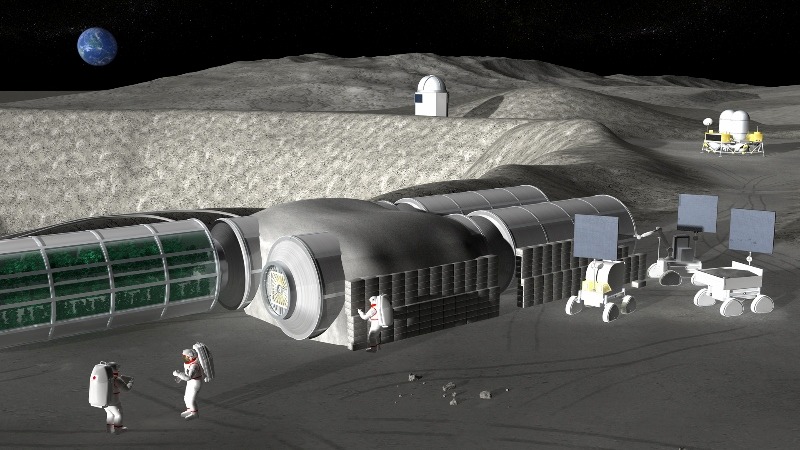
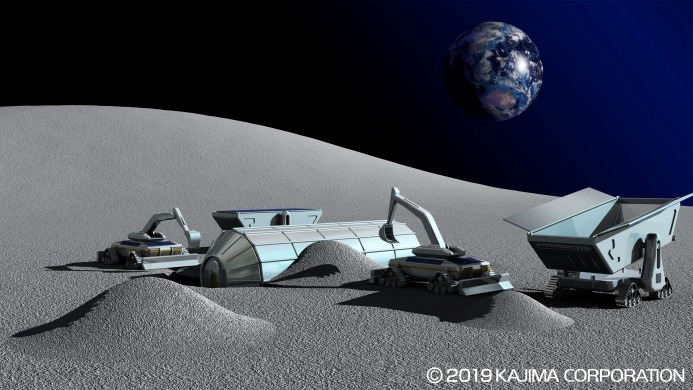
月面で行われる宇宙基地建設工事のイメージ(資料:JAXA)
共同研究開発のテーマは、「遠隔操作と自動制御の協調による遠隔施工システムの実現」というもので
ナ、ナ、ナ、ナント、
月面での“無人ICT土工”
を行う技術だったのです。(JAXA、鹿島のプレスリリースはこちら)
月面で宇宙基地建設を無人で建設する作業は、(1)居住空間となるモジュール設置場所の整地→(2)所定の深さまでの掘削→(3)モジュールの設置→(4)モジュールを隕石や放射線から防護するための覆土、と大きく4つのステップが考えられます。

(1)宇宙基地建設の流れ。まずは月面を整地する(以下の資料、写真:鹿島)
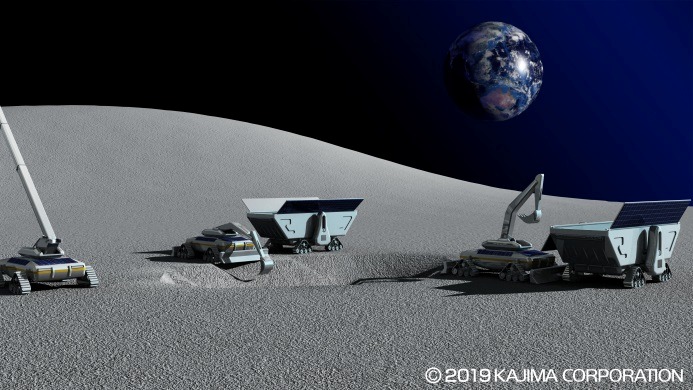
(2)続いて所定の深さまで掘削

(3)居住用のモジュールを設置する
(4)モジュールを土で覆う
地球と月は約38万kmも離れているため通信の電波が届くのに1秒ちょっともかかってしまうため、建機を遠隔操作するための通信が遅れてしまいます。
そこで、この研究では遠隔操作と自動運転を組み合わせることにより、月面での遠隔施工を実現することを目指しました。
7t級のキャリアダンプとバックホーに車体の位置や方位を計測する機器や、自動走行制御技術を搭載し、遠隔操作と自動運転ができるように改造し、鹿島西湘実験フィールド(神奈川県小田原市)で月面での施工を想定する実験を行いました。
 自動キャリアダンプ |
 自動バックホー |
実験で検証したのはまず、3~8秒という大きな通信遅延があっても、建機の操作性や安定性を損なわずに、作業計画に応じた遠隔操作を可能にする支援機能です。
また、作業中に地形の変化などをリアルタイムに把握できなくなった場合は、現地で計測したデータをもとに、建機が自律的・自動的に判断する機能や、複数の建機を遠隔操作する際に、衝突回避などの応急動作を自律的に行う機能も開発しました。
これらの建機で繰り返し作業や定型的な作業、地点間の移動は自動運転で、細かい調整が必要な作業は遠隔操作で行うことにより、月面での無人化施工について
実現可能性を見い出した
とのことです。
鹿島は建機の自律運転や自動運転を活用した「A4CSEL(クワッドアクセル)」という次世代の建設生産システムを開発し、2015年から実際の現場に導入しています。
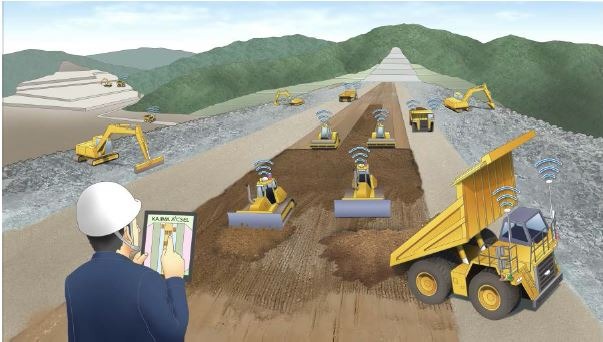
クワッドアクセルによる施工イメージ
今後はGNSS(全地球測位システム)が使えない月や火星での高精度な位置推定技術や正確な地形認識技術、通信が不安定なときの安定性確保などの研究も進めていくとのことです。
月面での工事といった話を聞くたびに、重い建機や建設資材を果たしてロケットで持って行けるのかということがいつも気になりますが、専門家がガチで施工技術を研究しているということは、輸送のメドも立っているということなんでしょうね。
いよいよ建設会社も宇宙に出て行くときが迫ってきたようですね。