管理人のイエイリです。
人手不足に悩む建設業にとって、省人化や自動化が最も求められる作業の一つが「墨出し」です。
設備を吊り下げる部材や、設備を通す穴の位置などを現場に描きこんでいく作業ですが、これまでは作業者が2人一組で図面と現場を照らし合わせながら、メジャーで何度も計測しながら点や線を求めていく労働集約的な仕事でした。

墨出し作業の例。図面と現場を照らし合わせ、何度も計測しながら設備などを設置する点を求めていく(以下の写真、資料:三谷産業)
この作業を効率化するため、空調設備の経験豊富な三谷産業(本社:石川県金沢市)と、ロボット遠隔指示の技術開発を行うエスイーフォー(本社:東京都台東区)は、画期的な技術を開発し、実証実験を行いました。
建物などのBIM(ビルディング・インフォメーション・モデリング)モデルと、現場を計測した点群データを合体させ、
ナ、ナ、ナ、ナント、
VRで墨出し位置
を指示するものなのです。(三谷産業とエスイーフォーのプレスリリースはこちら)

VR上で墨出し位置を指示するイメージ
似たような墨出しシステムとしてはこれまで、MR(拡張現実)デバイスの「HoloLens」とBIMモデルを組み合わせたものなどがありましたが、HoloLensが数十万円と高価で、しかも入手困難なため、なかなか導入しにくいという面もありました。
今回のシステムでは、わずか数万円程度の「デプスカメラ」をロボットに装着し、建物内を巡回してスキャンすることで、現場の点群データ(3次元空間マップ)を取得しています。
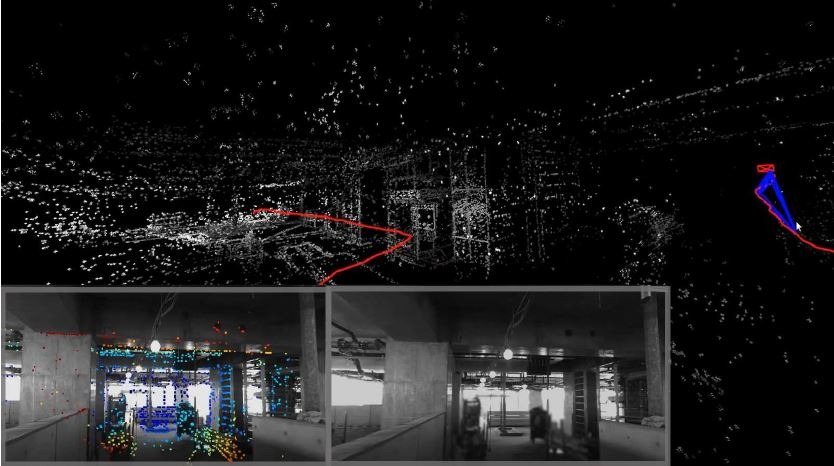
現場の様子(右下)。デプスカメラで建物内をスキャンしたイメージ(左下)。そのデータをもとに生成し点群データ(中央上)には、柱などの構造が再現されているのがわかる。赤線はロボットが通った軌跡
この点群データとBIMモデルを組み合わせて、VR空間上に表示し、人間が墨出し位置を指示。その位置情報をロボットに伝えると墨出し位置としての穴あけを行ってくれるという流れです。

点群データとBIMモデルを重ねてVR空間上に表示したイメージ。この空間内で墨出し位置の調整や穴あけ作業の指示を行う

指示された墨出し位置に自動的に穴をあけるロボット
エスイーフォーの技術の特徴は、すべての工程をロボットで自動化するのではなく、
あえて人が介在
することで、最終的な位置決めの確認や微調整などを柔軟に判断できるようにしたことです。
ロボットには位置や距離測定などの分析や重労働の部分を任せる一方、人間には臨機応変や対応や柔軟な判断を行わせることで、お互いの強みを補完し合う設計になっているのです。
人間はロボットに対する指示をまとめて行えるため、複数のロボットを”子分”のように従えて同時に作業させることもできます。
ロボットを全自動化したあまり、融通がきかなくてイライラしたり、手戻りが生じたりというストレスが生じない点でも、人間とロボットの共同作業がスムーズに進みそうですね。