管理人のイエイリです。
少子高齢化による労働力不足を克服するため、これからの工事現場には、建設用ロボットがどんどん増えていくことが予想されます。
これまで、ロボットに作業範囲を知らせるために、現場にカラーコーンを置いたり、事前に学習させたりといった手間がかかっていました。
しかし、多数のロボットが人間と一緒に働く時代になってくると、いちいちこんな面倒なことはやっていられませんね。
そこで竹中工務店は、ロボットが自律走行するための経路や範囲を指定したり、遠隔操作や監視を行ったりするため、クラウド上で稼働する基盤システム「建設ロボットプラットフォーム」を開発しました。
いわば人間とロボットがお互いにコミュニケーションする場を作ったわけですが、その意思疎通に使っているのは、
ナ、ナ、ナ、ナント、
建物のBIMデータ
だったのです。(竹中工務店のプレスリリースはこちら)
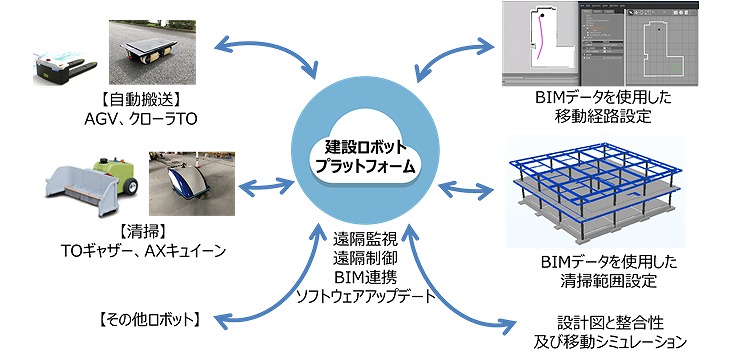
BIMデータを活用した「建設ロボットプラットフォーム」の概要(資料:竹中工務店)
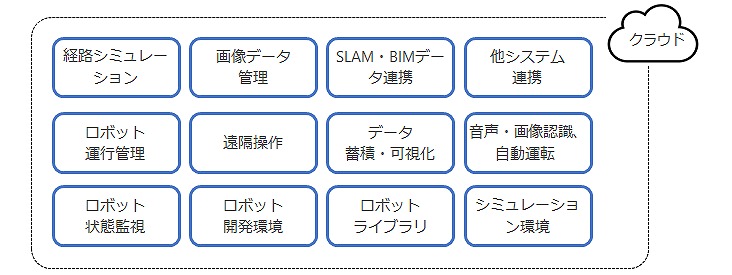
「建設ロボットプラットフォーム」で扱うアプリケーションの例
このシステムによって可能になることの1つは、BIM(ビルディング・インフォメーション・モデリング)データと連携したロボットの自動走行です。
BIMデータ上にロボットが移動や動作できる範囲を指定すると、それを地図情報として遠隔指示でロボットの自律走行が可能になります。
現地でいちいち作業前に移動範囲を設定したり、データ入力したりする必要がなくなり、クラウド上のBIMモデルでどこからでも簡単に指定できるようになるわけですね。
また、ロボットの遠隔監視やソフトウエア開発も効率的に行えます。
クラウド上で各ロボットのバッテリー状態や異常状態を監視できるほか、ロボット制御などのソフト開発や各種センサーとの連携も、1つのプラットフォームに対応させるだけでいいので効率的になります。
で、このシステムは竹中工務店だけに「閉じた世界」なのかというと、そうではありません。
ナント、
鹿島のためにも開発
しているのです。
なお、このシステムは、ブレインズテクノロジー(本社:東京都港区)に委託して開発しました。
先日(2020年2月5日)、当ブログの記事で鹿島と竹中工務店が二重開発をやめて、ロボットやIoT技術を相互利用するための技術連携を進めているというニュースをご紹介しましたが、このプラットフォームは「場内搬送管理システム・建設ロボットプラットフォーム」開発のうち、竹中工務店が担っている開発項目だからです。

鹿島と竹中工務店の共同開発、相互利用のイメージ。「共同開発例」として「場内搬送管理システム・建設ロボットプラットフォーム」がある(資料:鹿島、竹中工務店)
BIMはこれまで、人間の設計や施工管理の業務を効率化するために使われてきましたが、今後はロボットやAI(人工知能)と人間の両者がコミュニケーションを図る“共通言語”としても、発展していきそうですね。