広いコンクリート床面の施工管理や維持管理で重要なのは、ひび割れの発見と記録です。
これまでは専門の検査員が「近接目視」でひび割れを発見、幅などを計測し、写真やスケッチで記録していたため、多大なマンパワーが必要でした。
そこでロボットベンチャーのイクシス(本社:川崎市幸区)と安藤ハザマは、この検査を自動的に行ってくれる「自律走行式ひび割れ検査ロボット」を開発しました。
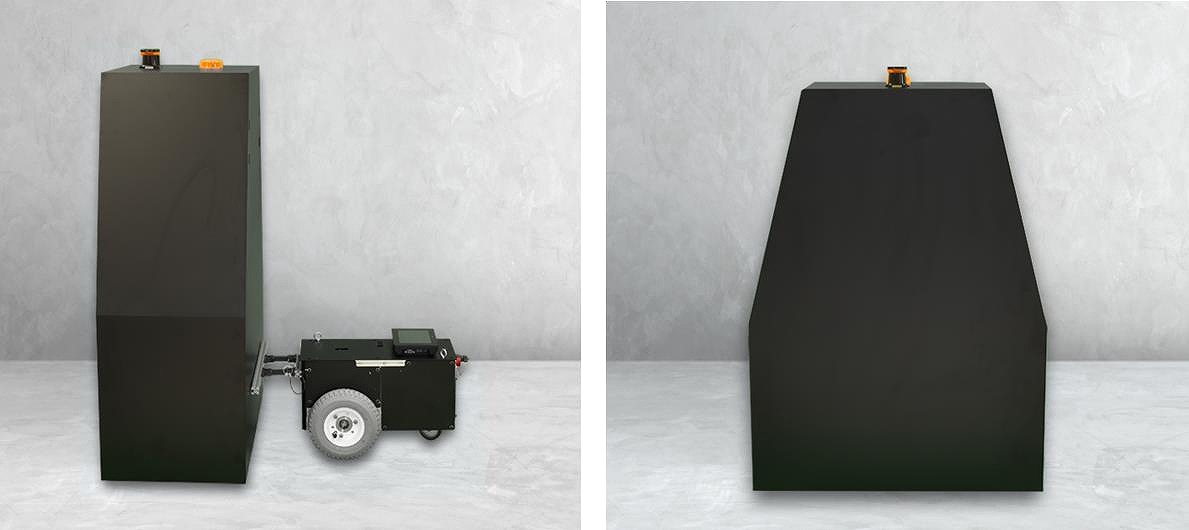
「自律走行式ひび割れ検査ロボット」の外観(以下の写真、資料:イクシス)
このロボットをスタートさせると、コンクリート床面を自動的に走行して、床面を自動撮影してくれるだけでなく、
ナ、ナ、ナ、ナント、
AIでひび割れを発見
し、幅を0.1mm単位で計測・記録してくれるのです。(イクシスのプレスリリースはこちら)

コンクリート床面の写真(左)を撮影し、0.1mm幅以上のひび割れを自動的に計測・記録(右)してくれる
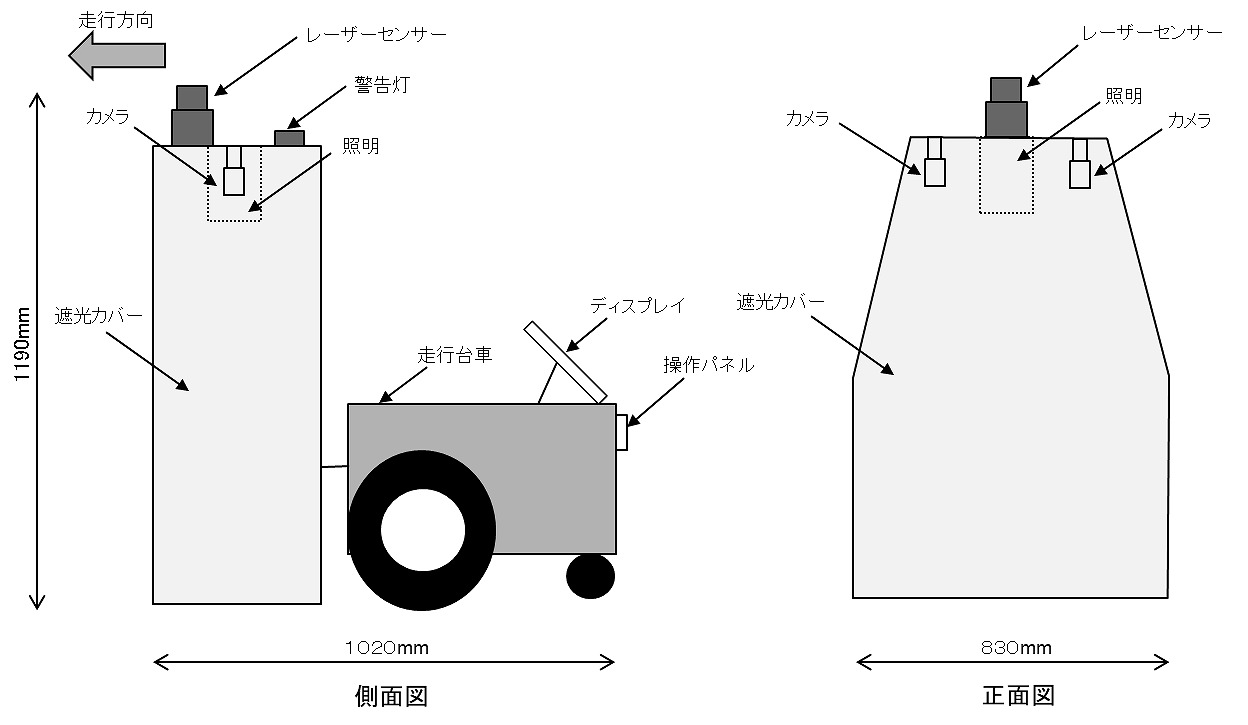
ロボットの構造。走行部と撮影部からなる
作業に当たってはまず、検査範囲を指定します。するとロボットは床面をくまなく自動走行します。
ロボットにはレーザーセンサーが搭載されており周囲の物体を検知し、SLAM(スラム)という技術で周囲の地図を作製しながら走るので、柱などの障害物があっても自動的に避けて走ります。
そして後部の撮影装置内にはカメラとフラッシュライトが内蔵されており、一定間隔で床面の写真を撮ります。
このとき、撮影部分は遮光カバーで覆われ、一定の光度、角度、距離で撮れるので、外的要因に左右される一定品質の写真が撮れます。
この撮影画像を無線LANでパソコンに随時、転送し、AI(人工知能)がリアルタイムに0.1mm幅以上のひび割れを検出。CAD図面上に色分け表示したデータを作成・表示します。
そのため、走行終了後。、すぐに検査結果を図面にプロットし、スピーディーに記録書類を作成できます。
例えば、1500m2のコンクリート床面の場合は、約6時間で検査でき、記録書類を作成するまでの時間は、従来の近接目視に比べると
約40%の短縮
となります。
検査ロボットの重量は35kgで、撮影装置と走行台車を分離できるので持ち運びも簡単です。また、ロボットとパソコンだけでシステムが完結しているので小回りの利く使い方でできるのもいいですね。
イクシスは2019年、人間が押して動かす方式の床面ひび割れ検知ロボット(手動式)「Floor Doctor」を開発しました。今回のロボットはそれを進化させてもののようです。

床面ひび割れ検知ロボット(手動式)「Floor Doctor」
また同社はこのほか、ロープウエー型の写真撮影ロボ「Rope Stroller」や、3Dスキャナー持ち上げロボ「VAN-BO」といった建設業のニーズに特化した“飛び道具”の数々を開発してきました。

3Dスキャナー持ち上げロボ「VAN-BO」の使用例(左)と計測した点群データ(右)
そして、これらのロボットで計測したデータを、BIM(ビルディング・インフォメーション・モデリング)やCIM(コンストラクション・インフォメーション・モデリング)、点群データなどの成果品にまとめる「3D Data Solution Service」も2020年4月1日に開始しました。